
无人机飞控设计
控制核心采用STM32F103C8T6,姿态运动传感器选择MPU6050。无人机通过Si24R1(NRF24L01)与遥控器进行2.4G无线通信,实现了即时有效地接遥控器指令,通过串级PID进行姿态控制,从而在空间中实现自由移动。
飞控原理图
-
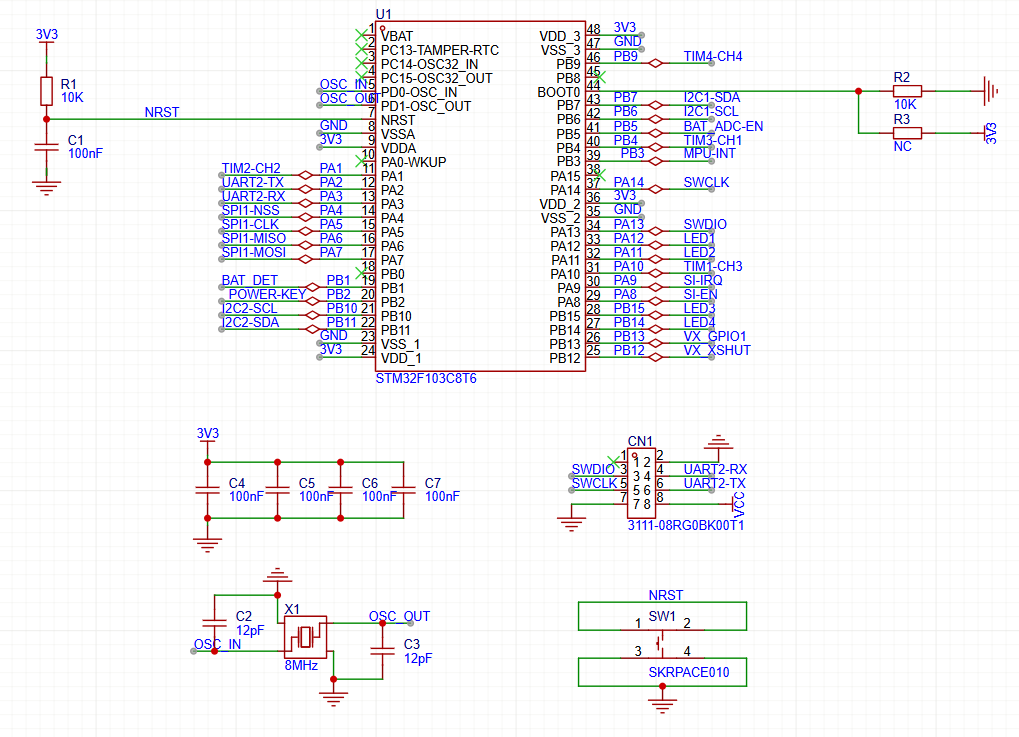
主控芯片
-
STM32F103C8T6
-
最小电路
- 3.3V供电
- 复位按钮
- 烧录引脚 - - - ->STLIND0
- 外接晶振
-
-
陀螺仪MPU6050
- 使用I2C1进行通信
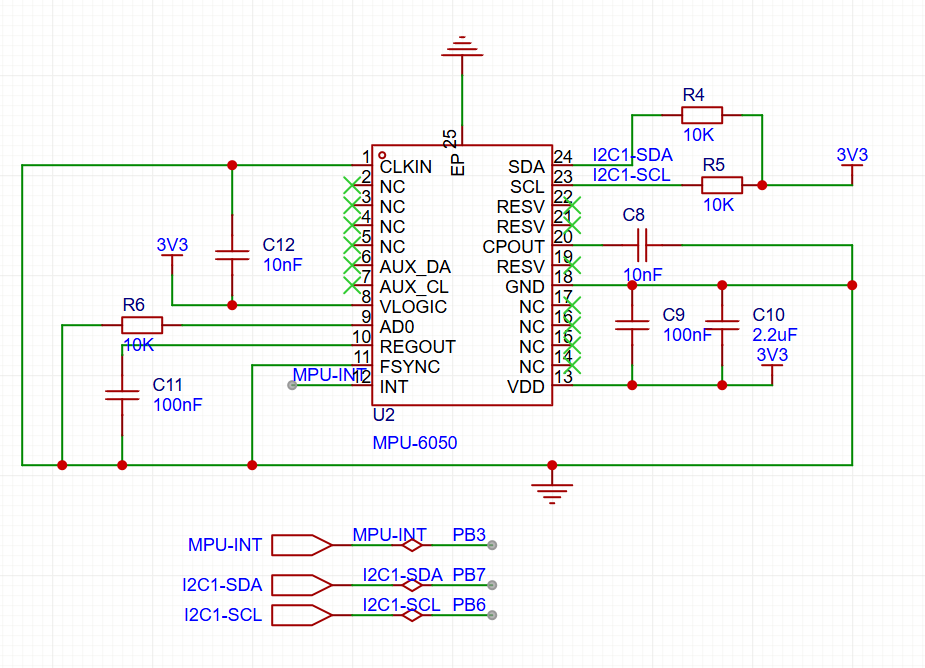
- 使用I2C1进行通信
-
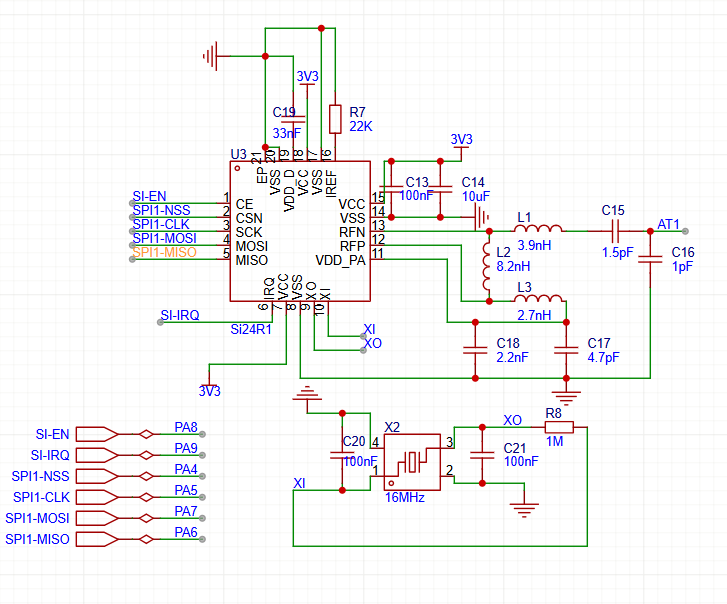
2.4G无线通信
- 采用Si24R1,2.4G无线通信
- 采用SPI1连接主控芯片
- 外界16MHZ晶振
-
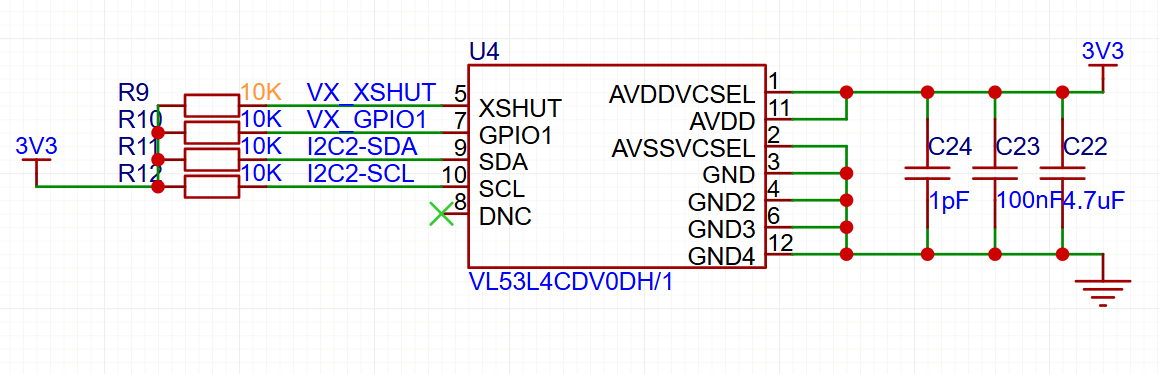
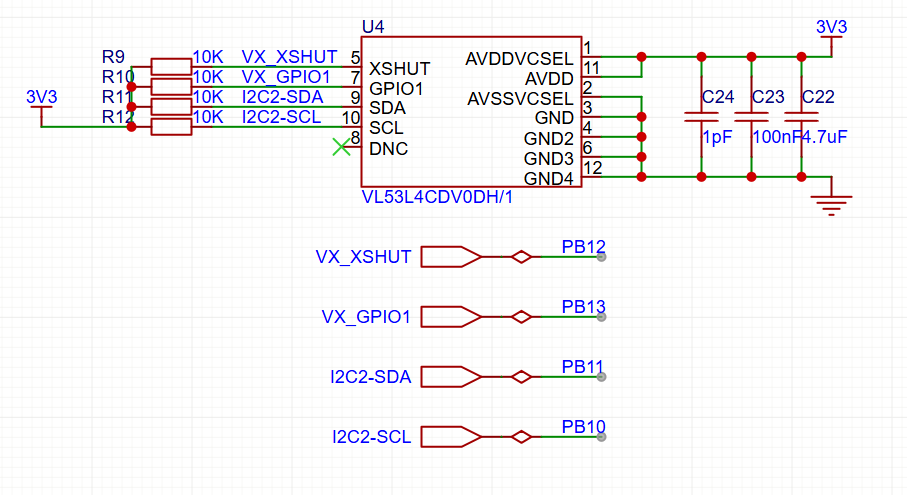
激光测高
- 采用VL53L4CD0DH测距传感器
- I2C2接线
-
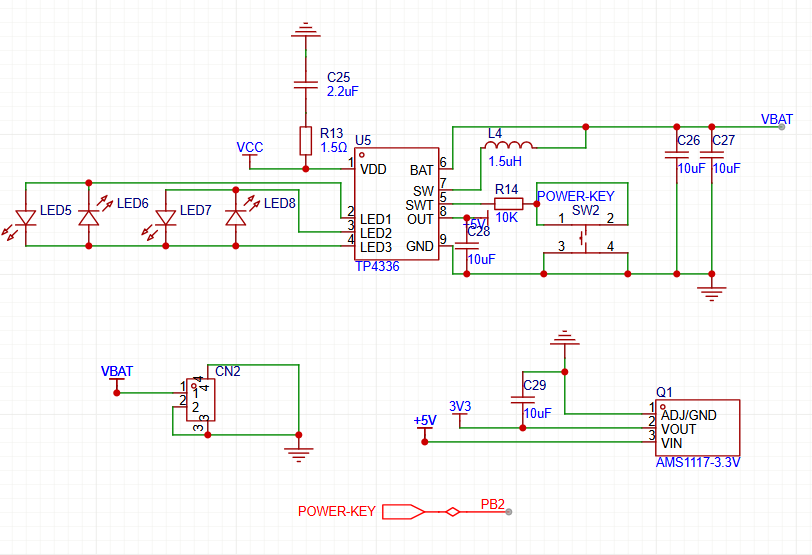
锂电池充放电管理模块
- TP4336芯片 充电管理芯片
- AMS1117-3.3V 降压芯片
- 锂电池插座
-
电机插槽
- 驱动四个电机 PWM
- mos驱动 电压更加稳定
-
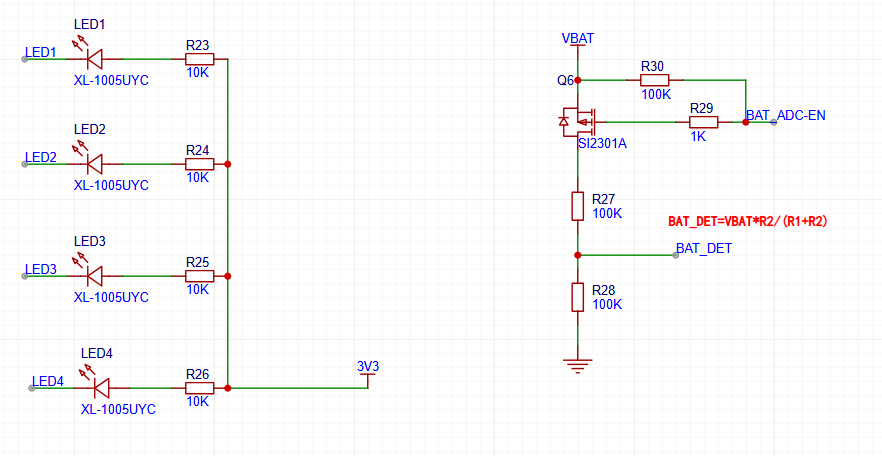
信号灯和监控电池电压
- 开发板周围4个信号灯
- 由于ADC的量程上限是3.3v,没有办法直接测量,所以采用分压电路
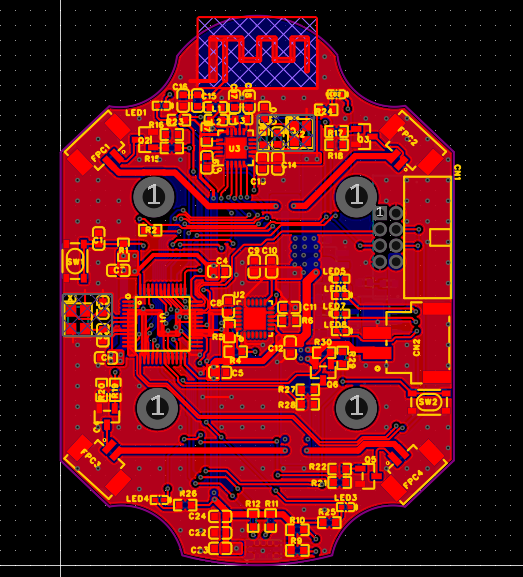
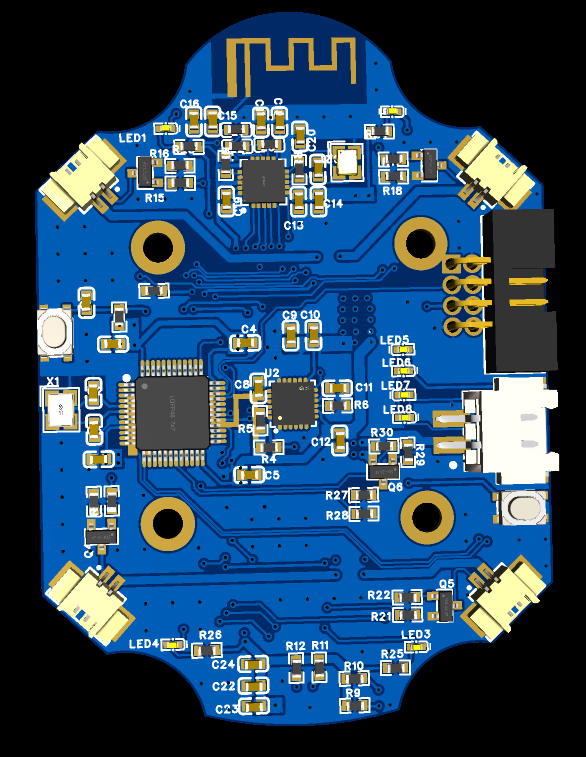
PCB
-
绘制板框
-
布局元件
-
按键和接口放置在开发板边缘
-
主控芯片尽量在中间位置
-
MPU6050陀螺仪芯片必须在中间
-
-
布线 布线顺序,还是比较重要的,从电源布线一步步来
-
电源布线
-
VCC主供电
-
VBAT
-
5V输出
-
降压稳压芯片
- 输入5V
- 输出3.3V
-
-
主控芯片最小电路
-
MPU6050陀螺仪布线
-
测量电池电压
-
电机插座
-
红外激光测距
-
2.4G通讯
-
led灯和接口
-
-
天线布线
-
特定尺寸 需要直接导入封装
-
尺寸严格 不能修改
-
-
GND铺铜网络
-
孤岛区域需要单独连接
-
打通孔提高载流能力
-
-
美化开发板
-
调整丝印
-
添加文字
-
泪滴工具 => 有效提高稳定性 提高载流能力
-
成品
感受
布线还是太折磨人了,一直在打孔,调整线的位置。
但是当你布好所有线时,会有很强的成就感