电机
电源就是插上后,直接供电,启动,所以没有写相关的代码
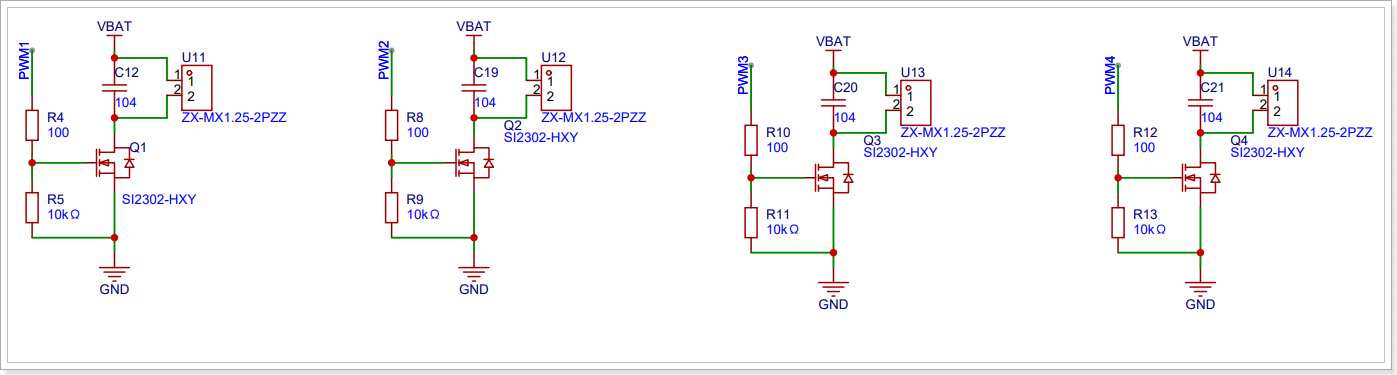
分析原理图
1
2
3
4
|
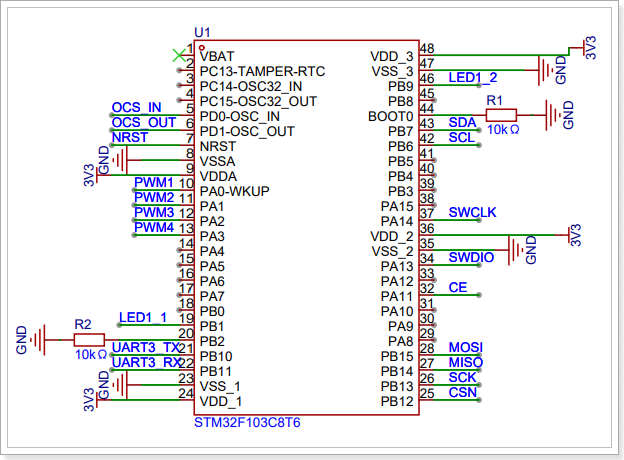
PWM1 => PA0
PWM2 => PA1
PWM3 => PA2
PWM4 => PA3
|
STM32F103C8T6的引脚对应
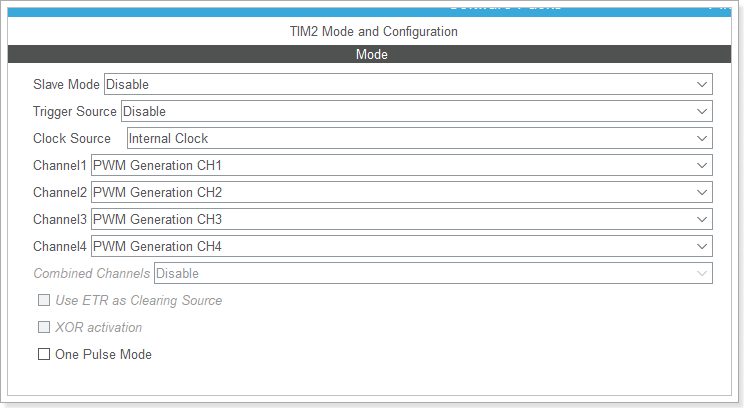
PWM是使用TIM2定时器的四个通道
HAL库配置TIM2
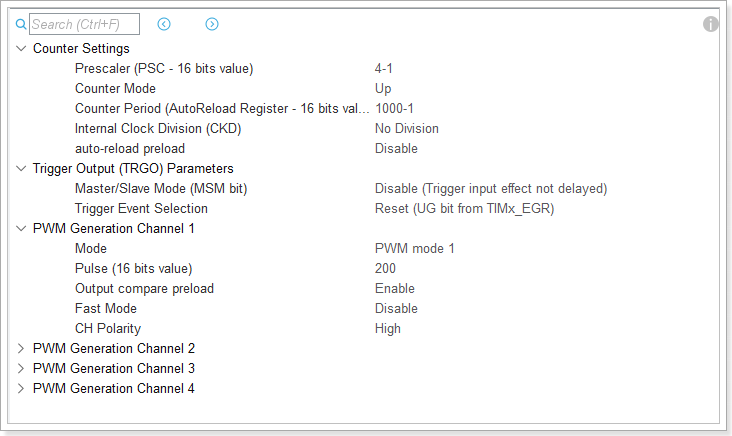
设置定时器
- 重装载系数
- 重装载的值代表定时器计数多少次为1轮
- 选择了一个好算的1000次为1轮
- 周期 = 1000 * 1/18M = 55.55us 55us一个周期
同理由于重装载值也是从0开始计数,所以写1000 -1
- 占空比
- 通道比较值 / 重装载值
- 通道比较值不用减一,自己设定 这里设置为200
- 200/1000 也就是20%,一个周期的20%的时间是有效电平
硬件
使用的是8520的空心杯电机
85 → 直径 8.5 mm
20 → 长度 20 mm
程序
程序部分,就是启动定时器,设置占空比
都有对应的函数
Int_motor.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
#ifndef INT_MOTOR_H
#define INT_MOTOR_H
#include "tim.h"
#include "Com_debug.h"
typedef struct
{
TIM_HandleTypeDef *tim; // 定时器句柄
uint16_t channel; // 定时器通道
uint16_t speed; // 电机速度值
} Motor_Struct_T;
/**
* @brief 传入的参数其实是电机速度值 最大为1000 默认200
* @param motor 电机结构体指针
*/
void Int_motor_set_speed(Motor_Struct_T *motor);
/**
* @brief 启动电机
* @param motor 电机结构体指针
*/
void Int_motor_start(Motor_Struct_T *motor);
#endif // INT_MOTOR_H
|
Int_motor.c
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
#include "Int_motor.h"
/**
* @brief 传入的参数其实是电机速度值 最大为1000 默认200
* @param speed 电机速度值
*/
void Int_motor_set_speed(Motor_Struct_T *motor){
if(motor->speed > 1000) {
debug_printf("motor speed out of range, setting to 1000");
return ;
}
// 设置定时器的占空比
__HAL_TIM_SET_COMPARE(motor->tim, motor->channel, motor->speed);
}
/**
* @brief 启动电机
* @param motor 电机结构体指针
*/
void Int_motor_start(Motor_Struct_T *motor){
// 启动定时器
HAL_TIM_PWM_Start(motor->tim, motor->channel);
}
|
motor_task
任务就是简单调用
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
|
//电机结构体
Motor_Struct_T left_top_motor = {
.tim = &htim2, // 定时器
.channel = TIM_CHANNEL_1, // 定时器通道1
.speed = 200 // 默认速度值
};
Motor_Struct_T right_top_motor = {
.tim = &htim2, // 定时器2
.channel = TIM_CHANNEL_2, // 定时器通道2
.speed = 200 // 默认速度值
};
Motor_Struct_T left_bottom_motor = {
.tim = &htim2, // 定时器2
.channel = TIM_CHANNEL_3, // 定时器通道3
.speed = 200 // 默认速度值
};
Motor_Struct_T right_bottom_motor = {
.tim = &htim2, // 定时器2
.channel = TIM_CHANNEL_4, // 定时器通道4
.speed = 200 // 默认速度值
};
void flight_task( void * arg ){
//获取基准时间
TickType_t xLastWakeTime = xTaskGetTickCount();
while(1){
//1.设置电机转速
left_top_motor.speed = 400;
//2.启动电机
Int_motor_start(&left_top_motor);
Int_motor_start(&right_top_motor);
Int_motor_start(&left_bottom_motor);
Int_motor_start(&right_bottom_motor);
vTaskDelayUntil(&xLastWakeTime,FLIGHT_TASK_PERIOD);
}
}
|
到后面设置摇杆后,通过摇杆的上下推,来设置油门
从0-1000